

Автопилот АП-05



Назначение
Предназначен для управления беспилотными летательными аппаратами различного типа: самолёт произвольной аэродинамической схемы; мультироторный, классический, соосный вертолёт; конвертоплан; дирижабль; автожир.Решаемые задачи
- Определение параметров движения и получения вектора навигационных измерений путём комплексирования инерциальных, спутниковых, барометрических датчиков
- Выполнение автоматических взлёта и посадки
- Движение летательного аппарата по маршруту с автоматическим регулированием каналов тангажа, крена, курса, высоты, скорости, режимов работы силовой установки
- Осуществление информационного взаимодействия по протоколам гарантированной и негарантированной доставки с наземной станцией управления
- Управление полезной нагрузкой
- Управления внешними вспомогательными и исполнительными устройствами
- Самодиагностика системы
Основные потребительские свойства
- Помехозащищённые интерфейсы мультиплексного обмена с полезной нагрузкой, исполнительными и периферийными устройствами
- Достаточный для пилотирования БПЛА комплекс навигационных устройств в одном корпусе
- Комплексирование средств командно-телеметрической связи
- Встроенные средства объективного контроля («чёрный ящик»)
- Широкие возможности по расширению
- Средства имитационного моделирования (hardware in loop, HiL) на базе OpenSource проекта FlightGear для отработки системы управления
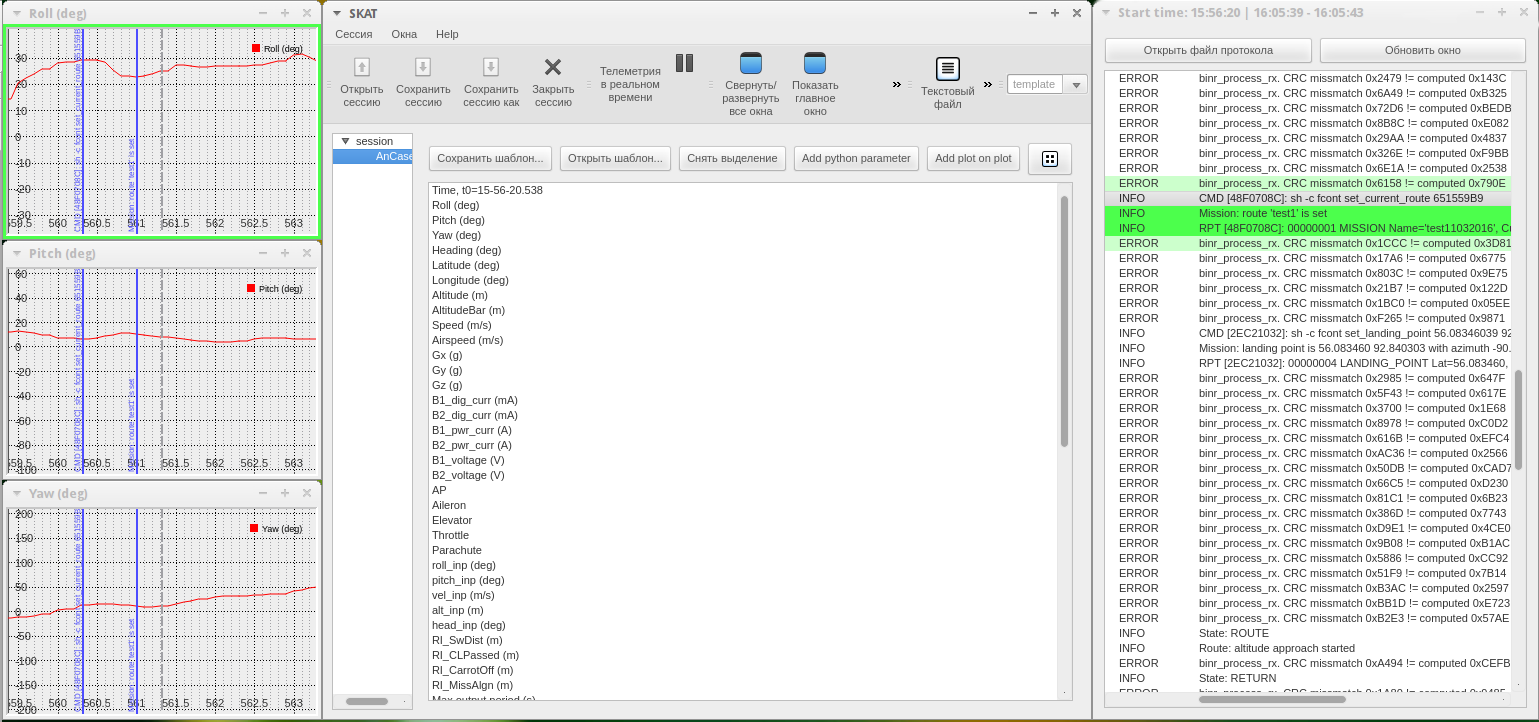
- Наличие программного обеспечения наземного комплекса управления
- Наличие программного обеспечения анализа данных объективного контроля
Ключевые особенности
- Модульная, мультиагентная программная архитектура
- Операционная система реального времени QNX Neutrino (доступен отечественный аналог, принятый на снабжение: ЗОСРВ «НЕЙТРИНО» КПДА.10964-01)
- Обеспечивается решение по автоматическому построению mesh сети на базе модемов РМ-02М2, РМ-16М
- Средства макропрограммирования пилотажного уровня управления
- Средства макропрограммирования логического управления поведением: диагностика, управление резервом, перепланирование полётного задания на основании диагностики и внешних событий (остаток топлива, разряд батарей, отсутствие связи, отказ элементов системы и т.д.)
- Макроконфигурация телеметрической информации
- Перекрёстное нагруженное (горячее) резервирование ресурсов прибора
- Доступность SDK для разработки бортового программного обеспечения
- Доступность SDK для разработки наземного программного обеспечения автоматизированного рабочего места оператора
Технические характеристики
|
Поддерживаемые интерфейсы |
|
|
Расширение с устройством ввода/вывода* |
|
|
Частота решения САУ |
50; 100 Гц* |
|
Характеристики вычислителя |
|
|
Архитектура вычислителя |
ARM9 |
|
Производительность вычислителя |
400 MIPS |
|
Объём оперативной памяти |
64 Мбайт |
|
Объём энергонезависимой памяти |
256 Мбайт |
|
Характеристики навигационной системы |
|
|
Диапазон измерения угловой скорости |
± 300 ° |
|
Диапазон измерения ускорения |
± 6 g |
|
Точность определения тангажа и крена при маневрировании |
не хуже 1° |
|
Точность определения курса |
не хуже 3° |
|
Поддерживаемые системы спутниковой радионавигации |
ГЛОНАСС, GPS |
|
Погрешность определения линейных координат |
6 м |
|
Погрешность определяния проекций линейной скорости |
0,1 м/с |
|
Характеристики электропитания |
|
|
Диапазон напряжения питания |
9–36 В |
|
Потребляемая мощность, не более |
3 Вт |
|
Стойкость к внешним воздействующим факторам |
|
|
Диапазон рабочих температур |
от минус 50 до +70 °C |
|
Влажность |
от 6 до 98% |
|
Давление |
от 0 до 820 мм рт. ст. |
|
Массогабаритные характеристики |
|
|
Масса |
180 г |
|
Габаритные размеры |
130×62×45 мм |
|
Характеристики надёжности |
|
|
Наработка на отказ |
10000 ч |
|
Срок службы |
10 лет |
*функция доступна опционально, требуется уточнение варианта исполнения в запросе.
Аппаратная структура АП-05

Программная структура АП-05

Функциональная схема нагруженного перекрёстного резерва

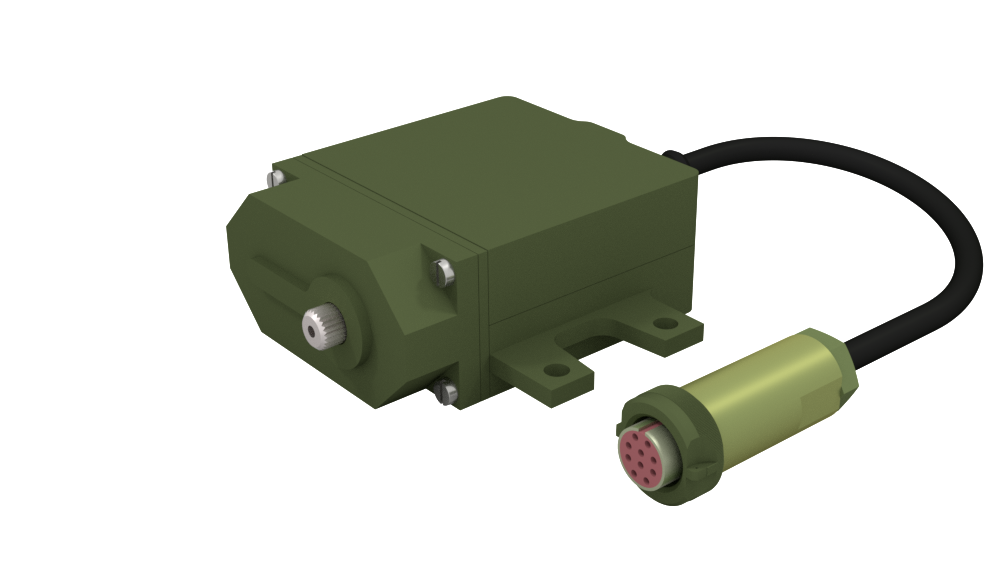
Пример построения пилотажно-навигационного комплекса БПЛА

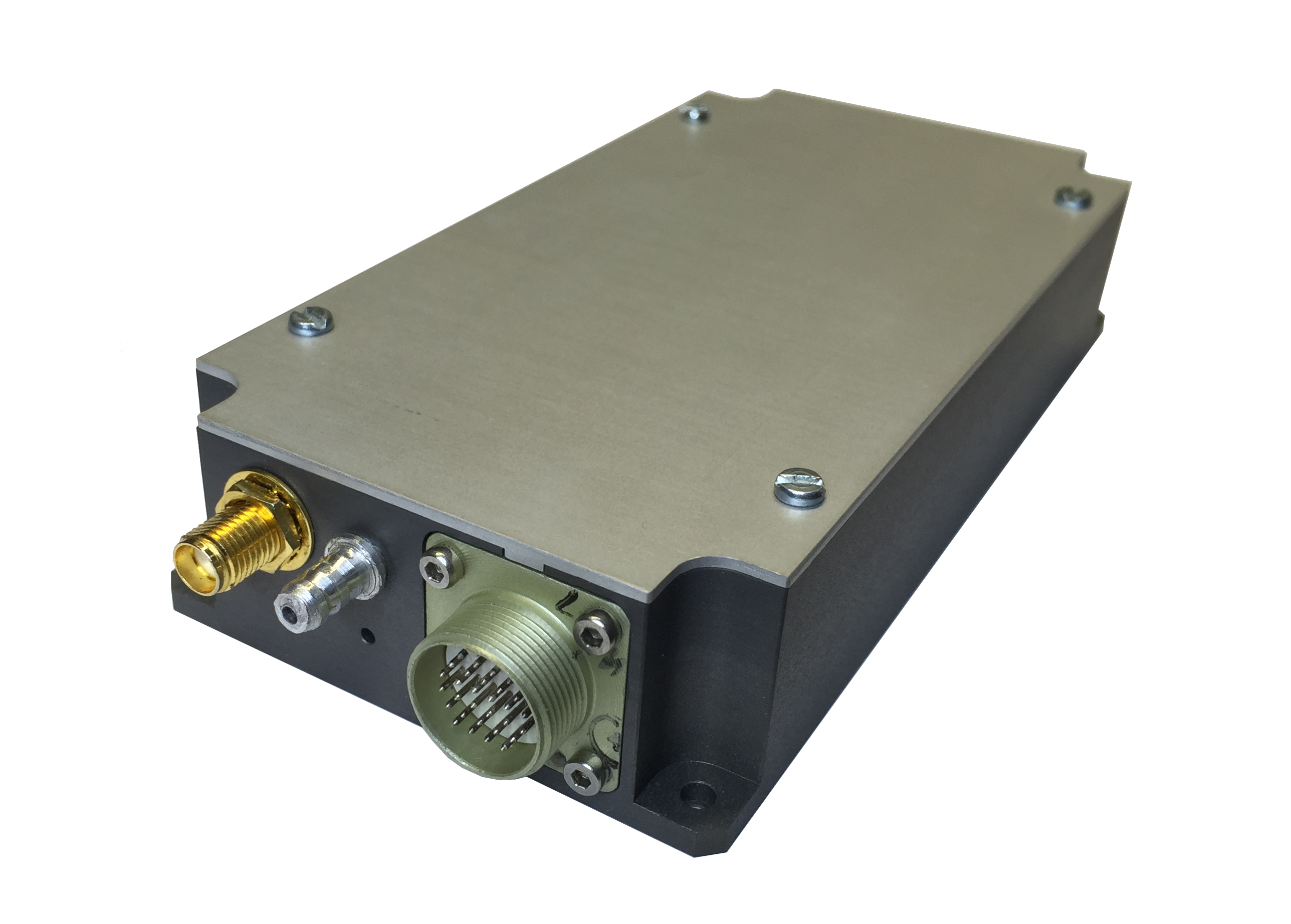
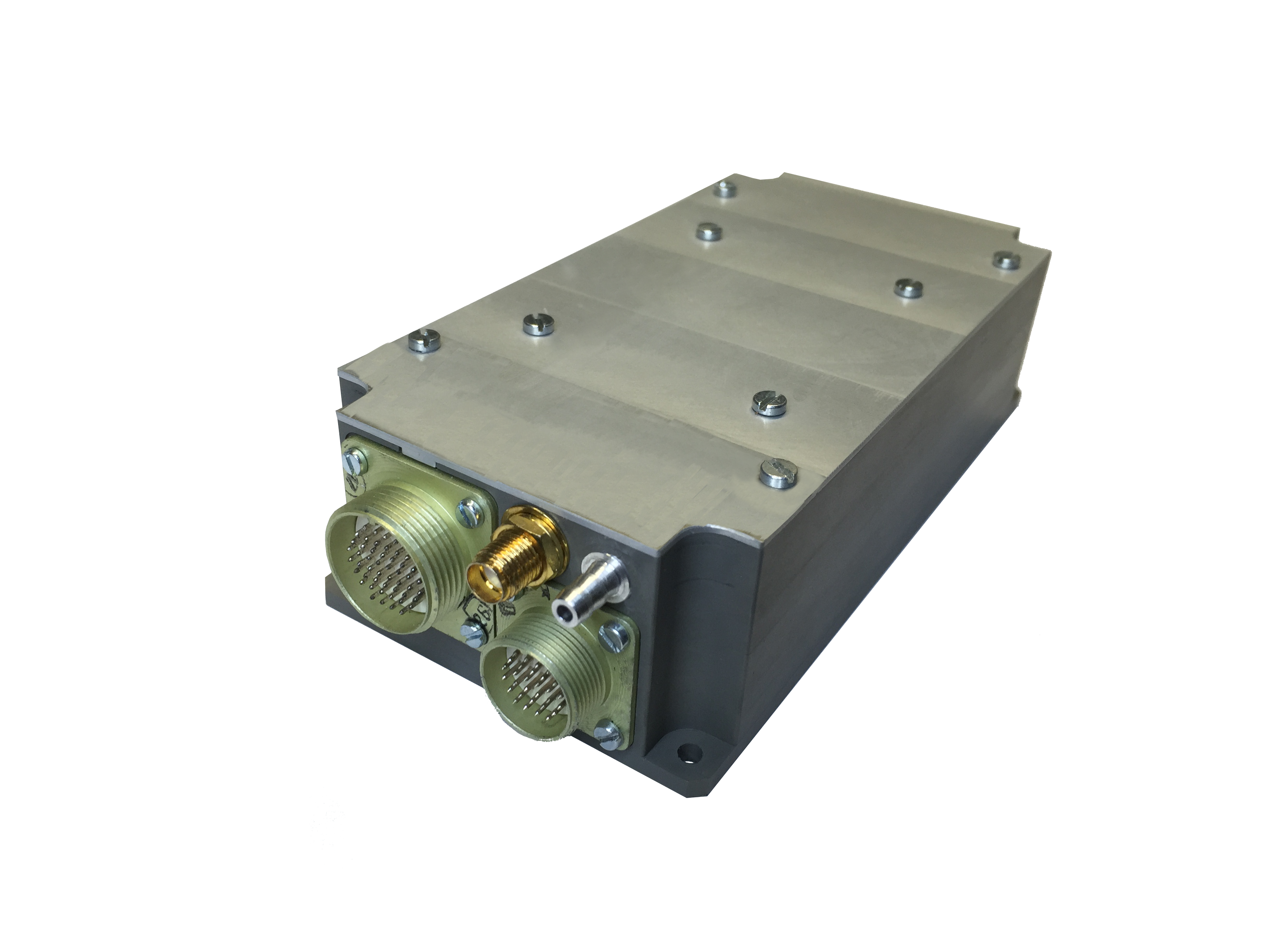
Фото продукта





660079, Россия, г. Красноярск,
ул. Электриков, 156/1